亚星娱乐登录体育真人
- [导读]
- 本帖最后由 yuyy1989 于 2023-6-24 19:01 编辑 #申请原创# 6.用MCPWM让电机转起来 之前用手动控制IO的方法成功让电机转了起来,不过LKS32MC071有电机控制专用的MCPWM模块,是一个精确控制电机驱动波形输出的
本帖最后由 yuyy1989 于 2023-6-24 19:01 编辑
#申请原创# 6.用MCPWM让电机转起来
之前用手动控制IO的方法成功让电机转了起来,不过LKS32MC071有电机控制专用的MCPWM模块,是一个精确控制电机驱动波形输出的模块。
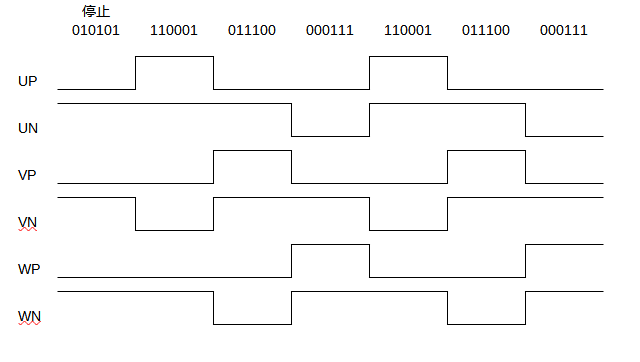
首先对上一贴的控制序列做个处理,UP UN VP VN WP WN序列
1 1 0 0 0 1
0 1 1 1 0 0
0 0 0 1 1 1
停止时
0 1 0 1 0 1
转换为波形是这样的
从手册里看MCPWM的介绍,貌似找不到合适的波形输出,改一下这个序列,因为电机引脚有个下拉电阻

我想是不是不用的引脚直接拉低也行,所以变成
1 1 0 0 0 0
0 0 1 1 0 0
0 0 0 0 1 1
再转成波形

这次就很容易找到对应的了

中心对齐输出,但是CHN要翻转一下
先用上一贴的手动控制IO的方法试了一下,这个序列是可以转起来的,接下来编写MCPWM的代码
为了保证能转起来,IO的切换速度尽量靠近手动控制IO的速度,手动控制IO时是每10ms转动三分之一,换成一个PWM周期是30ms,频率在30Hz左右,用12M的系统时钟可以正好得到这个频率,但是在实际使用时发现设置成12M时钟后MCU不工作了,尝试24M时钟可以正常工作,因此最终频率设置成了50Hz
工程需添加库文件lks32mc07x_mcpwm.c

代码示例
复制代码
正式接电机使用前,如果有示波器最好用示波器看一下波形是否正常,以免烧坏电机
运行效果

这只是一个刚入门无刷电机的人做的一个简单的用MCPWM驱动电机的示例,后面会继续研究无刷电机的控制方法
#申请原创# 6.用MCPWM让电机转起来
之前用手动控制IO的方法成功让电机转了起来,不过LKS32MC071有电机控制专用的MCPWM模块,是一个精确控制电机驱动波形输出的模块。
首先对上一贴的控制序列做个处理,UP UN VP VN WP WN序列
1 1 0 0 0 1
0 1 1 1 0 0
0 0 0 1 1 1
停止时
0 1 0 1 0 1
转换为波形是这样的
从手册里看MCPWM的介绍,貌似找不到合适的波形输出,改一下这个序列,因为电机引脚有个下拉电阻
我想是不是不用的引脚直接拉低也行,所以变成
1 1 0 0 0 0
0 0 1 1 0 0
0 0 0 0 1 1
再转成波形
这次就很容易找到对应的了
中心对齐输出,但是CH
先用上一贴的手动控制IO的方法试了一下,这个序列是可以转起来的,接下来编写MCPWM的代码
为了保证能转起来,IO的切换速度尽量靠近手动控制IO的速度,手动控制IO时是每10ms转动三分之一,换成一个PWM周期是30ms,频率在30Hz左右,用12M的系统时钟可以正好得到这个频率,但是在实际使用时发现设置成12M时钟后MCU不工作了,尝试24M时钟可以正常工作,因此最终频率设置成了50Hz
工程需添加库文件lks32mc07x_mcpwm.c
代码示例
- #include "lks32mc07x.h"
- #include "yuyy_delay.h"
-
- void led_init(void)
- {
- GPIO_InitTypeDef GPIO_InitStruct;
- GPIO_StructInit(&GPIO_InitStruct);
- GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT;
- GPIO_InitStruct.GPIO_Pin = LED_PINS;
- GPIO_Init(LED_GPIO, &GPIO_InitStruct);
- GPIO_ResetBits(LED_GPIO, LED1_PIN|LED2_PIN);
- GPIO_SetBits(LED_GPIO, LED3_PIN);
- }
-
- void key_init()
- {
- GPIO_InitTypeDef GPIO_InitStruct;
- GPIO_StructInit(&GPIO_InitStruct);
- GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN;
- GPIO_InitStruct.GPIO_Pin = KEY_PINS;
- GPIO_Init(KEY_GPIO, &GPIO_InitStruct);
- }
-
- void uvw_testinit()
- {
- GPIO_InitTypeDef GPIO_InitStruct;
- GPIO_StructInit(&GPIO_InitStruct);
- GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT;
- GPIO_InitStruct.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9;
- GPIO_Init(GPIO1, &GPIO_InitStruct);
- GPIO_PinAFConfig(GPIO1, GPIO_PinSource_4, AF3_MCPWM);
- GPIO_PinAFConfig(GPIO1, GPIO_PinSource_5, AF3_MCPWM);
- GPIO_PinAFConfig(GPIO1, GPIO_PinSource_6, AF3_MCPWM);
- GPIO_PinAFConfig(GPIO1, GPIO_PinSource_7, AF3_MCPWM);
- GPIO_PinAFConfig(GPIO1, GPIO_PinSource_8, AF3_MCPWM);
- GPIO_PinAFConfig(GPIO1, GPIO_PinSource_9, AF3_MCPWM);
- }
-
- #define MCU_MCLK (24000000LL)
- #define PWM_MCLK ((u32)MCU_MCLK)
- #define PWM_MCLK_DIV 3
- #if(PWM_MCLK_DIV == 0)
- #define PWM_PRSC
- #elif(PWM_MCLK_DIV == 1)
- #define PWM_PRSC 2
- #elif(PWM_MCLK_DIV == 2)
- #define PWM_PRSC 4
- #elif(PWM_MCLK_DIV == 3)
- #define PWM_PRSC 8
- #endif
- #define PWM_FREQ0 ((u16)50)
-
-
- #define MCPWM_PERIOD0 ((u16) (PWM_MCLK / (u32)(2 * PWM_FREQ0 *(PWM_PRSC)))) //15位 最大32767
- #define MCPWM_WIDTH (MCPWM_PERIOD0*2/3)
-
- #define DEADTIME_NS ((u16)1200)
- #define DEADTIME (u16)(((unsigned long long)PWM_MCLK * (unsigned long long)DEADTIME_NS)/1000000000uL)
-
- void mcpwm_init()
- {
- MCPWM_InitTypeDef MCPWM_InitStructure;
- MCPWM_StructInit(&MCPWM_InitStructure);
-
- MCPWM_InitStructure.MCLK_EN = ENABLE;
- MCPWM_InitStructure.CLK_DIV = PWM_MCLK_DIV;
-
- MCPWM_InitStructure.IO_FLT_CLKDIV = 12;
- MCPWM_InitStructure.CMP_FLT_CLKDIV = 12;
-
- MCPWM_InitStructure.AUEN = MCPWM0_ALL_AUPDAT;
-
-
-
- MCPWM_InitStructure.BASE_CNT0_EN = ENABLE;
- MCPWM_InitStructure.TH0 = MCPWM_PERIOD0;
-
- MCPWM_InitStructure.TH00 = (u16)(-MCPWM_PERIOD0+5);
- MCPWM_InitStructure.TH01 = (u16)(-MCPWM_PERIOD0+MCPWM_WIDTH-5);
- MCPWM_InitStructure.TH10 = (u16)(-MCPWM_PERIOD0+MCPWM_WIDTH+5);
- MCPWM_InitStructure.TH11 = (u16)(MCPWM_PERIOD0-MCPWM_WIDTH-5);
- MCPWM_InitStructure.TH20 = (u16)(MCPWM_PERIOD0-MCPWM_WIDTH+5);
- MCPWM_InitStructure.TH21 = (u16)(MCPWM_PERIOD0-5);
-
- MCPWM_InitStructure.MCPWM_WorkModeCH0 = MCPWM0_CENTRAL_PWM_MODE;
- MCPWM_InitStructure.MCPWM_WorkModeCH1 = MCPWM0_CENTRAL_PWM_MODE;
- MCPWM_InitStructure.MCPWM_WorkModeCH2 = MCPWM0_CENTRAL_PWM_MODE;
- MCPWM_InitStructure.DeadTimeCH012N = DEADTIME;
- MCPWM_InitStructure.DeadTimeCH012P = DEADTIME;
- MCPWM_InitStructure.CMP_CTRL_CNT0 = DISABLE ;
- MCPWM_InitStructure.EVT_CNT0_EN = DISABLE ;
- MCPWM_InitStructure.EVT0 = DISABLE ;
-
- MCPWM_InitStructure.TR0_UP_INTV = DISABLE;
- MCPWM_InitStructure.TR0_T0_UpdateEN = ENABLE ;
- MCPWM_InitStructure.TR0_T1_UpdateEN = DISABLE ;
- MCPWM_InitStructure.TR0_AEC = DISABLE;
-
- MCPWM_InitStructure.T0_Update0_INT_EN = DISABLE;
- MCPWM_InitStructure.T1_Update0_INT_EN = DISABLE ;
- MCPWM_InitStructure.Update1_INT_EN = DISABLE;
-
- MCPWM_InitStructure.CH0N_Polarity_INV = ENABLE;
- MCPWM_InitStructure.CH0P_Polarity_INV = DISABLE;
- MCPWM_InitStructure.CH1N_Polarity_INV = ENABLE;
- MCPWM_InitStructure.CH1P_Polarity_INV = DISABLE;
- MCPWM_InitStructure.CH2N_Polarity_INV = ENABLE;
- MCPWM_InitStructure.CH2P_Polarity_INV = DISABLE;
-
- MCPWM_InitStructure.Switch_CH0N_CH0P = DISABLE;
- MCPWM_InitStructure.Switch_CH1N_CH1P = DISABLE;
- MCPWM_InitStructure.Switch_CH2N_CH2P = DISABLE;
-
-
- MCPWM_InitStructure.CH0P_default_output = MCPWM0_LOW_LEVEL;
- MCPWM_InitStructure.CH0N_default_output = MCPWM0_HIGH_LEVEL;
- MCPWM_InitStructure.CH1P_default_output = MCPWM0_LOW_LEVEL;
- MCPWM_InitStructure.CH1N_default_output = MCPWM0_HIGH_LEVEL;
- MCPWM_InitStructure.CH2P_default_output = MCPWM0_LOW_LEVEL;
- MCPWM_InitStructure.CH2N_default_output = MCPWM0_HIGH_LEVEL;
-
- MCPWM_InitStructure.CH0N_FAIL_EN = ENABLE ;
- MCPWM_InitStructure.CH0P_FAIL_EN = ENABLE ;
- MCPWM_InitStructure.CH1N_FAIL_EN = ENABLE ;
- MCPWM_InitStructure.CH1P_FAIL_EN = ENABLE ;
- MCPWM_InitStructure.CH2N_FAIL_EN = ENABLE ;
- MCPWM_InitStructure.CH2P_FAIL_EN = ENABLE ;
-
- MCPWM_InitStructure.FAIL0_INPUT_EN = DISABLE ;//FAIL_0CAP
- MCPWM_InitStructure.FAIL0_INT_EN = DISABLE;
- MCPWM_InitStructure.FAIL0_Signal_Sel = MCPWM0_FAIL_SEL_CMP ;//FAIL_0CAP
- MCPWM_InitStructure.FAIL0_Polarity = MCPWM0_HIGH_LEVEL_ACTIVE ;
-
- MCPWM_InitStructure.FAIL1_INPUT_EN = DISABLE ;//FAIL_0CAP
- MCPWM_InitStructure.FAIL1_INT_EN = DISABLE;
- MCPWM_InitStructure.FAIL1_Signal_Sel = MCPWM0_FAIL_SEL_IO ;//FAIL_0CAP
- MCPWM_InitStructure.FAIL1_Polarity = MCPWM0_HIGH_LEVEL_ACTIVE ;
-
- MCPWM_InitStructure.HALT_PRT0 = DISABLE ;
- MCPWM_InitStructure.FAIL_0CAP = DISABLE ;
- MCPWM_Init(&MCPWM_InitStructure);
-
- NVIC_SetPriority(MCPWM0_IRQn, 1);
- NVIC_EnableIRQ(MCPWM0_IRQn);
- }
-
- void MCPWM0_IRQHandler(void)
- {
- }
-
- void mcu_init(void)
- {
- __disable_irq();
- SYS_WR_PROTECT = 0x7a83;
- FLASH_CFG |= 0x00080000;
- IWDG_DISABLE();
- SYS_MclkChoice(SYS_MCLK_24M_RC);
- led_init();
- key_init();
- uvw_testinit();
- mcpwm_init();
- yuyy_delay_us(100);
- SYS_WR_PROTECT = 0x0;
- __enable_irq();
- }
-
- int main(void)
- {
- uint8_t run = 0;
- uint8_t key_start_downcount = 0;
- uint8_t key_stop_downcount = 0;
- uint8_t runstep = 0;
- mcu_init();
- while (1)
- {
- if(Bit_RESET == GPIO_ReadInputDataBit(KEY_GPIO,KEY_START_PIN))
- {
- if(key_start_downcount <0xFF)
- key_start_downcount++;
- }
- else
- {
- if(key_start_downcount > 3 && run == 0)
- {
- run = 1;
- runstep = 0;
- PWMOutputs(ENABLE);
- }
- key_start_downcount = 0;
- }
- if(Bit_RESET == GPIO_ReadInputDataBit(KEY_GPIO,KEY_STOP_PIN))
- {
- if(key_stop_downcount <0xFF)
- key_stop_downcount++;
- }
- else
- {
- if(key_stop_downcount > 3 && run > 0)
- {
- run = 0;
- runstep = 0;
- PWMOutputs(DISABLE);
- }
- key_stop_downcount = 0;
- }
- if(runstep > 0)
- runstep--;
- else
- {
- runstep = 20;
- switch(run)
- {
- case 1:
- GPIO_SetBits(LED_GPIO, LED1_PIN);
- GPIO_ResetBits(LED_GPIO, LED2_PIN);
- GPIO_SetBits(LED_GPIO, LED3_PIN);
- run = 2;
- break;
- case 2:
- GPIO_ResetBits(LED_GPIO, LED1_PIN);
- GPIO_SetBits(LED_GPIO, LED2_PIN);
- GPIO_SetBits(LED_GPIO, LED3_PIN);
- run = 3;
- break;
- case 3:
- GPIO_ResetBits(LED_GPIO, LED1_PIN);
- GPIO_ResetBits(LED_GPIO, LED2_PIN);
- GPIO_ResetBits(LED_GPIO, LED3_PIN);
- run = 1;
- break;
- default:
- GPIO_ResetBits(LED_GPIO, LED1_PIN);
- GPIO_ResetBits(LED_GPIO, LED2_PIN);
- GPIO_SetBits(LED_GPIO, LED3_PIN);
- run = 0;
- break;
- }
- }
- yuyy_delay_ms(10);
- }
- }
运行效果
这只是一个刚入门无刷电机的人做的一个简单的用MCPWM驱动电机的示例,后面会继续研究无刷电机的控制方法
-
- 本文系21ic原创,未经许可禁止转载!

亚星娱乐登录彩票
- 联系人:巧克力娃娃
- 邮箱:[email protected]
- 我要投稿
-
欢迎入驻,开放投稿
行业新闻
-

RAK831 Lite:基于树莓派3的LoRa网关... 2022-06-17
-
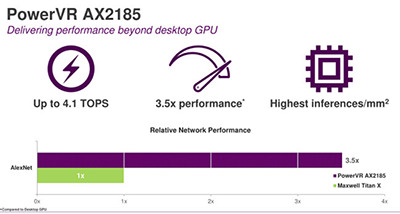
Imagination推出PowerVR AX2185和AX2145神经... 2022-06-17
-

ODROID-GO是一款兼容Arduino的基于ESP32的便... 2022-06-17














论坛活动
more+
项目外包
more+
-
兼职Java开发
预算:¥10000 5小时前
-
FPGA SCALER IP
预算:¥10000 23小时前
-
水阀流量传感器控制
预算:¥10000 1天前
-
摩托车流水爆闪转向灯
预算:¥10000 1天前
-
fpga做个fir滤波器
预算:¥300 2天前
-
51单片机websocket
预算:¥500 3天前
