首页 > 评测 > 亚星娱乐登录彩票 Sensortile评测----平坦度测量之42步进电机调试
亚星娱乐登录彩票 Sensortile评测----平坦度测量之42步进电机调试
- [导读]
- 项目需求,动作部分需要步进电机参与,去年论坛送的3D打印机还在,那就用A4988驱动模块和42步进电机了。 一、模块介绍: 1、步进电机: 1>步进电机:在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号
项目需求,动作部分需要步进电机参与,去年论坛送的3D打印机还在,那就用A4988驱动模块和42步进电机了。
一、模块介绍:
1、步进电机:
1>步进电机: 在非超载的情况下,电机 的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度 一步一步运行的 。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率 来控制电机转动的速度 。
2〉42步进电机
42意思是说安装机座宽42mm,如下图

其额定转矩为0.5Nm。
2、A4988步进电机驱动模块



下面是A4988在3D打印机应用中的经典模块电路

复制代码
一、模块介绍:
1、步进电机:
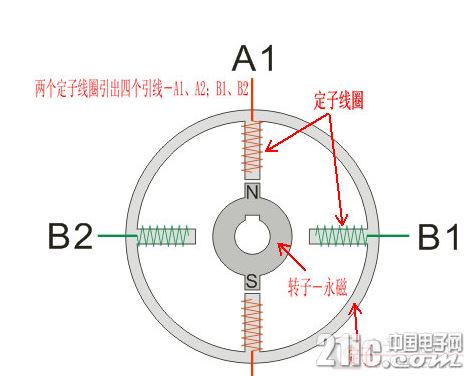
1>步进电机: 在非超载的情况下,电机 的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度 一步一步运行的 。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率 来控制电机转动的速度 。
图1 四线两相步进电机原理图
2〉42步进电机
42意思是说安装机座宽42mm,如下图
图2 42步进电机机械图
其额定转矩为0.5Nm。
2、A4988步进电机驱动模块
图3 A4988IC功能框图
A4988一个带转换器和过流保护功能的DMOS(vertical double-diffused MOSFET)微步驱动芯片。
其MS1/2/3是模式选择逻辑引脚,共有五种不同的步进模式(全、半、1/4、1/8、1/16),模式根据应用精度选择,其具体介绍见官方datasheet。
图4 模式逻辑表
图5 时序图
下面是A4988在3D打印机应用中的经典模块电路
图6 3D打印RAMPS1.4电路中的驱动模块
RAMPS1.4电路板中,MS1/2/3、reset和sleep引脚被上拉,step、enable和dir,以及OUT1A、OUT1B、OUT2A、OUT2B引脚外留。
二、用Arduino开发板调试驱动块:
开发板用的是ATmega2560 R3,驱动模块的dir、step、enable分别接于开发板的28、26、24接口,前面说过A4988的模式,网上查来说,在全模式下,转一圈要200个步进值或一个步进1.8°,而我们的板子是在1/16的模式下,即转一圈需要16*200个步,这里的1步指的是step引脚的一个周期方波,方波的周期决定了旋转的速度,而总的步进数决定了旋转的角位移,两者其实耦合,不纠结了,经测试方波的周期在300us至1600us之间电机运行稳定。
下面是这次调试的代码:
- char Dir=28;
- char Step=26;
- char Enable=24;
- //MS1/2/3 5V
- void setup() {
- // put your setup code here, to run once:
- pinMode(Enable,OUTPUT); // Enable
- pinMode(Step,OUTPUT); // Step
- pinMode(Dir,OUTPUT); // Dir
- digitalWrite(Enable,LOW); // Set Enable low
- //digitalWrite(Dir,HIGH); // Set Dir high
- }
- void loop() {
- // put your main code here, to run repeatedly:
- digitalWrite(Dir,HIGH); // Set Dir high 正转
- for(int x = 0; x <3200; x++)
- {
- digitalWrite(Step,HIGH); // Output high
- delayMicroseconds(800); //
- digitalWrite(Step,LOW); // Output low
- delayMicroseconds(800); //
- }
- delay(5000);
- digitalWrite(Dir,LOW); // Set Dir low 反转
- for(int x = 0; x <3200; x++)
- {
- digitalWrite(Step,HIGH); // Output high
- delayMicroseconds(800); //
- digitalWrite(Step,LOW); // Output low
- delayMicroseconds(800); //
- }
- delay(5000); // pause five second
- }
复制代码
三、总结:
此次调试唯一经验就是,一定不忘以前养成的程序编写习惯,切记,下面来说说这次遇到的坑,
首先、是第二次玩Arduino,对其编辑、编译器和代码书写要求没有任何好感,个人感觉。
其次、犯了一个很没程序素养的问题,程序是先让电机正转一圈,延迟5s后再反转一圈,如此轮回,结果一直在正转,怪了,什么鬼?于是拿着表测了一下方向控制脚,发现的确没有执行到这一步,看了半天没看出来,于是就回头去测电路板,排除硬件的影响,任然无效,于是从程序for循环开始排查,是不是步数转多了,电机剩磁太大,老死机的经验,就慢慢改步数,从3200改到了100,发现改到150时还是一样,但改到100时可以反转了,聪明的你知道是什么原因了吧,差不多找着你了,于是改到了126发现可以反转,又改到了130不反转,好家伙,x溢出了!!!,???恩,无缘无故你溢出个球,x怎么是char类型的,我明明定义的是int啊,于是想了想,当初定义了一个全局变量x,char类型的,写for的时候为了省事,就用了它,这回是哭笑不得,好吧,老了,记性太差,改回来后,ok了,觉得好笑,写这麽多,大家一起笑笑undefined。
-
- 本文系21ic原创,未经许可禁止转载!

亚星娱乐官网
- 联系人:巧克力娃娃
- 邮箱:[email protected]
- 我要投稿
-
欢迎入驻,开放投稿
行业新闻
-

RAK831 Lite:基于树莓派3的LoRa网关... 2022-06-17
-
Imagination推出PowerVR AX2185和AX2145神经... 2022-06-17
-

ODROID-GO是一款兼容Arduino的基于ESP32的便... 2022-06-17














项目外包
more+
-
兼职Java开发
预算:¥10000 5小时前
-
FPGA SCALER IP
预算:¥10000 23小时前
-
水阀流量传感器控制
预算:¥10000 1天前
-
摩托车流水爆闪转向灯
预算:¥10000 1天前
-
fpga做个fir滤波器
预算:¥300 2天前
-
51单片机websocket
预算:¥500 3天前
